Как сделать робота на arduino uno

Объезжающий препятствия робот на Arduino
Поиск Настройки. Время на прочтение 7 мин. В данной статье я хочу описать процесс сборки своего первого робота на ардуино. Материал будет полезен другим таким же новичкам, как и я, которые захотят изготовить какую-нибудь «самобеглую тележку». Статья представляет собой описание этапов работы с моими дополнениями по различным нюансам. Ссылка на итоговый код скорее всего, не самый идеальный дана в конце статьи.

 / Хабр")







Робот-художник на базе Arduino Uno
Нам кажется что многие из вас находятся под сильным впечатлением от быстро развивающихся технологий современного мира, одними из впечатляющих технологий современности являются двигатели от RYNO и самобалансирующиеся скутеры от Segway. Мы думаем, что многих из вас посещала мысль создать что либо подобное. Поэтому в данной статье мы рассмотрим создание DIY самодельного, своими руками самобалансирующегося робота на основе платы Arduino.







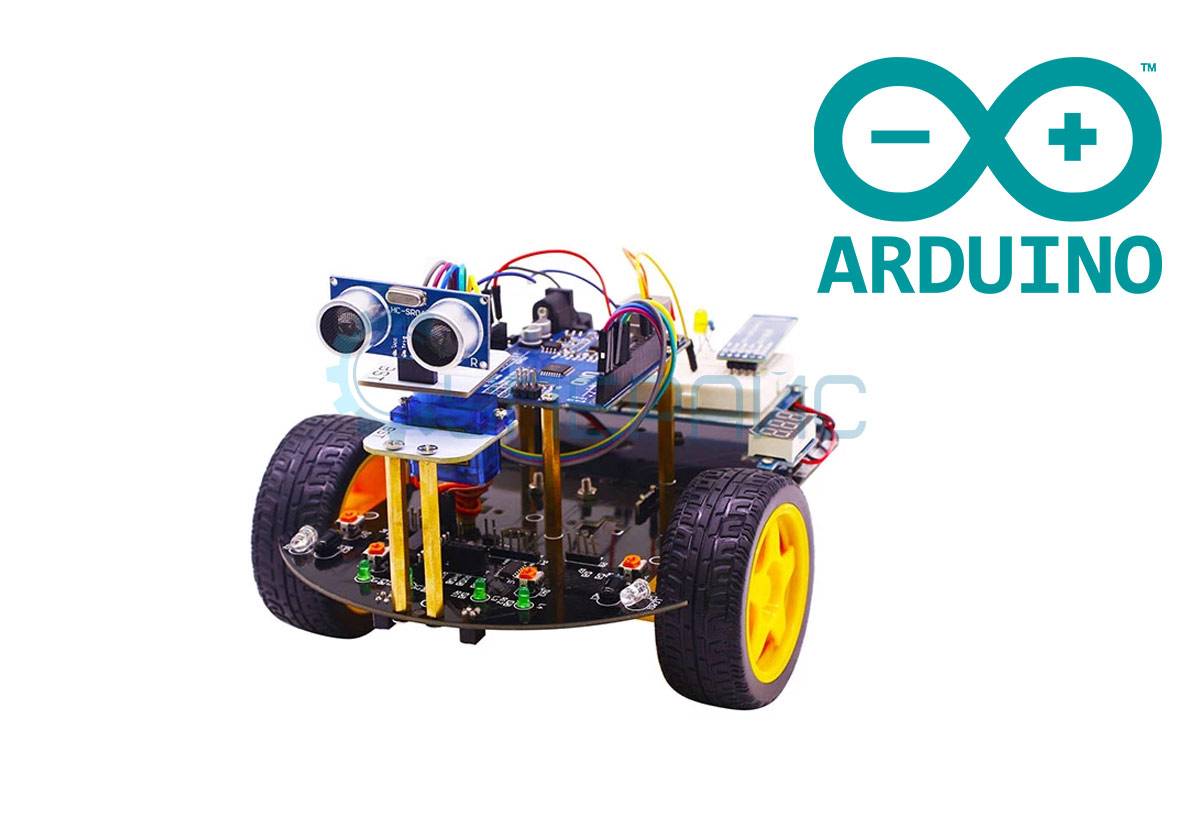
В этом уроке мы создадим машинку, которая будет ездить по траектории нарисованной линии, а также останавливаться при обнаружении препятствий. При создании любого робота, его нужно оснастить датчиками показания которых будет считывать робот , управляющими модулями для вывода результатов работы робота , и скетчем по алгоритму которого должен работать робот. В нашем случае, мы оснастим машинку, тремя аналоговыми датчиками линий и одним ультразвуковым датчиком расстояния , а в роли управляющих модулей выступят два закрепленных к каркасе моторчика , с колёсами на валах.